


ちょっと余談 ソレノイド選び方(necobit の場合)
ソレノイドの力を効率よく使うには

これと同じ、ボディ内部にソレノイド仕込みが1番効率良さそう…
だが、
Catbot本体が大きくなりすぎるので却下。
ソレノイド自体で直接太鼓を叩く方法も同様の理由で却下。
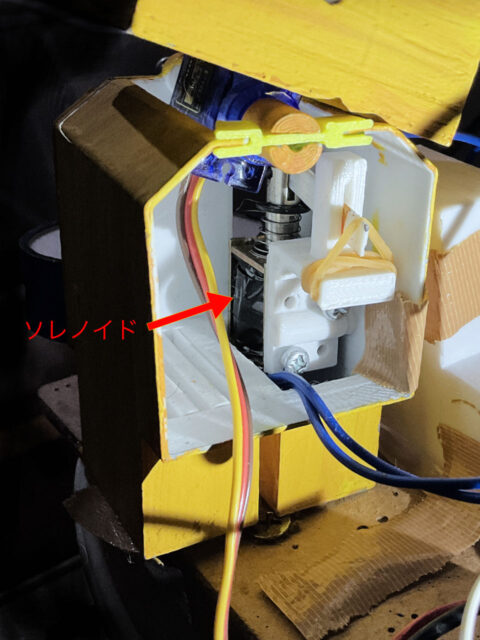
となると……下から引っ張るしかあるまい。人形劇方式だ。

腕を引っ張るための素材
腕を引っ張る素材は伸びや強度をいろいろ試して細めのテグス。

他に試したタコ糸は伸び過ぎ、もう少し太いテグスでは硬過ぎた。
また、ここをゴム系やスプリング素材にすると
引っ張られた瞬間に伸びて勢いを殺してしまい
叩く力は弱くなり、タイミングも少しずれてしまう。
腕を引く場所、つまりテグスと腕を結ぶ点は
肘よりもやや肩によった辺り。
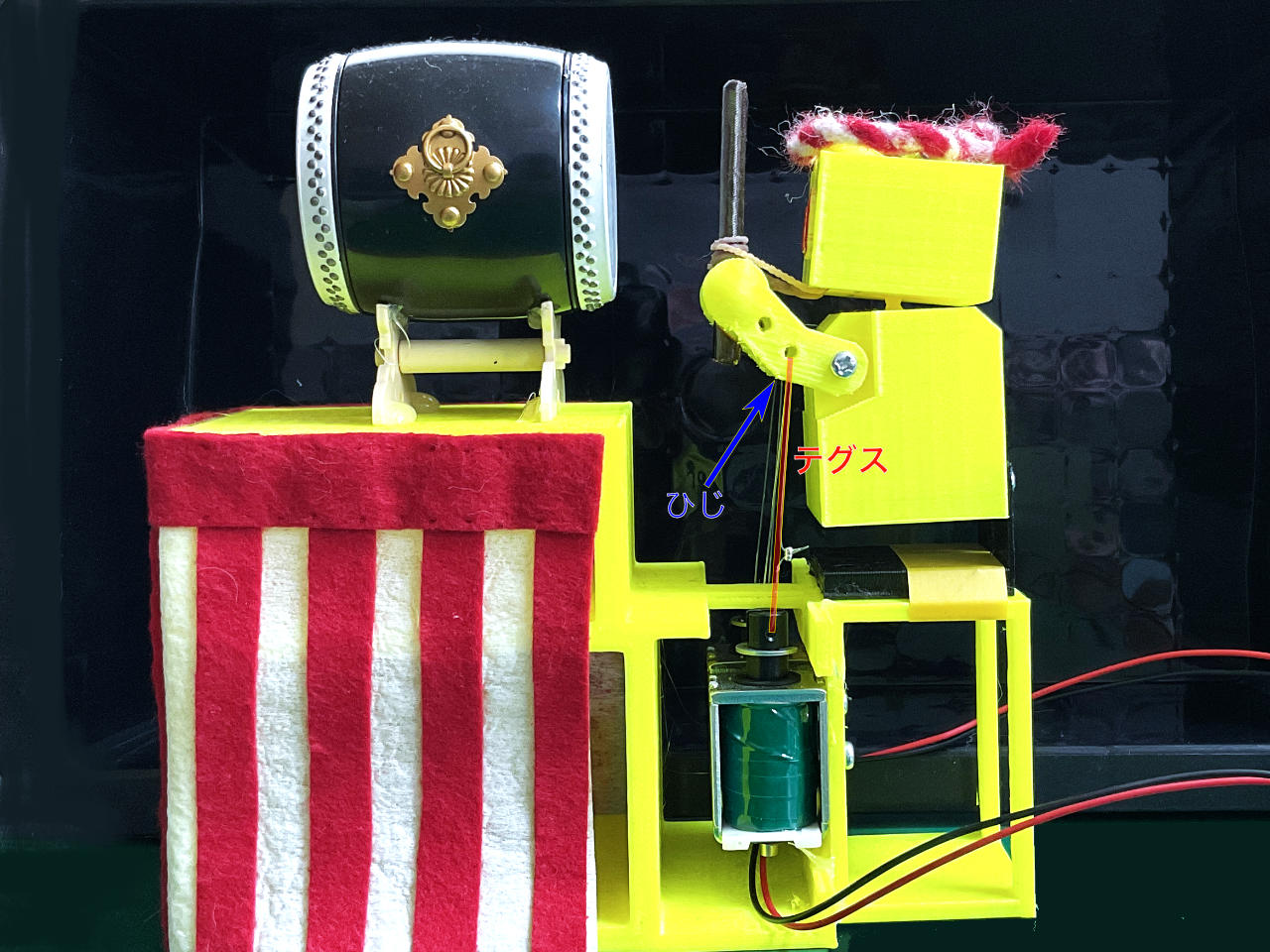
使用した 5Vソレノイドのストロークは5mm。
(ストロークとは簡単に言うとソレノイドの鉄芯が動く幅/長さ。もっと詳しくは→タカハ機工WEBサイト)
腕は大きめに動いた方がそれらしい動きになるので、
テコの原理で動きを大きくしてやる。
ただし、動きを大きくすればするほど叩く力は弱くなるので、
何度か調整してちょうどいい場所を決めていく。
ちょっと余談 関節にチャレンジ
太鼓の打面と腕の距離
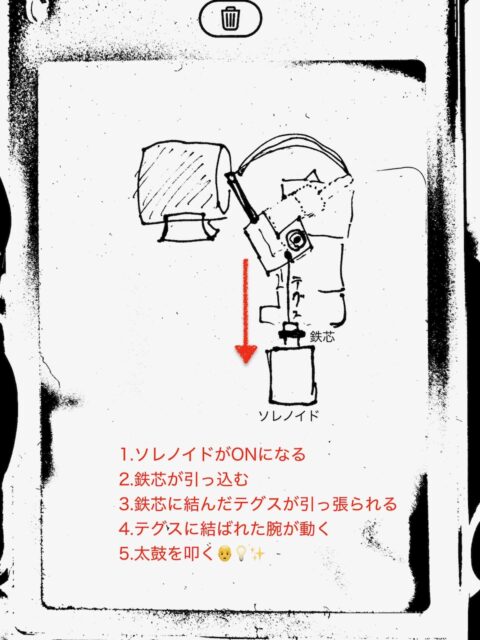
さあさあ、ソレノイドで腕を動かして太鼓を叩く、という
機構の基本的なところはできました。
が、
太鼓の打面とバチの距離
(バチは腕と一体化しています)
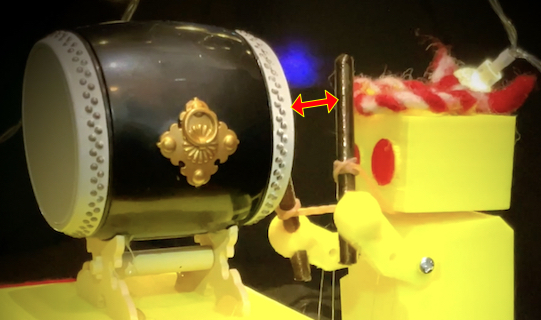
ここの調整がまだシビアすぎる…。
太鼓がいい音で鳴るちょうどいい距離がなかなか掴めない…。
こーれーはー時間かかるかなーーーと悩み始めたところ、
解決策はありました!
脚をPETGでしならせ、腕を輪ゴムで戻す
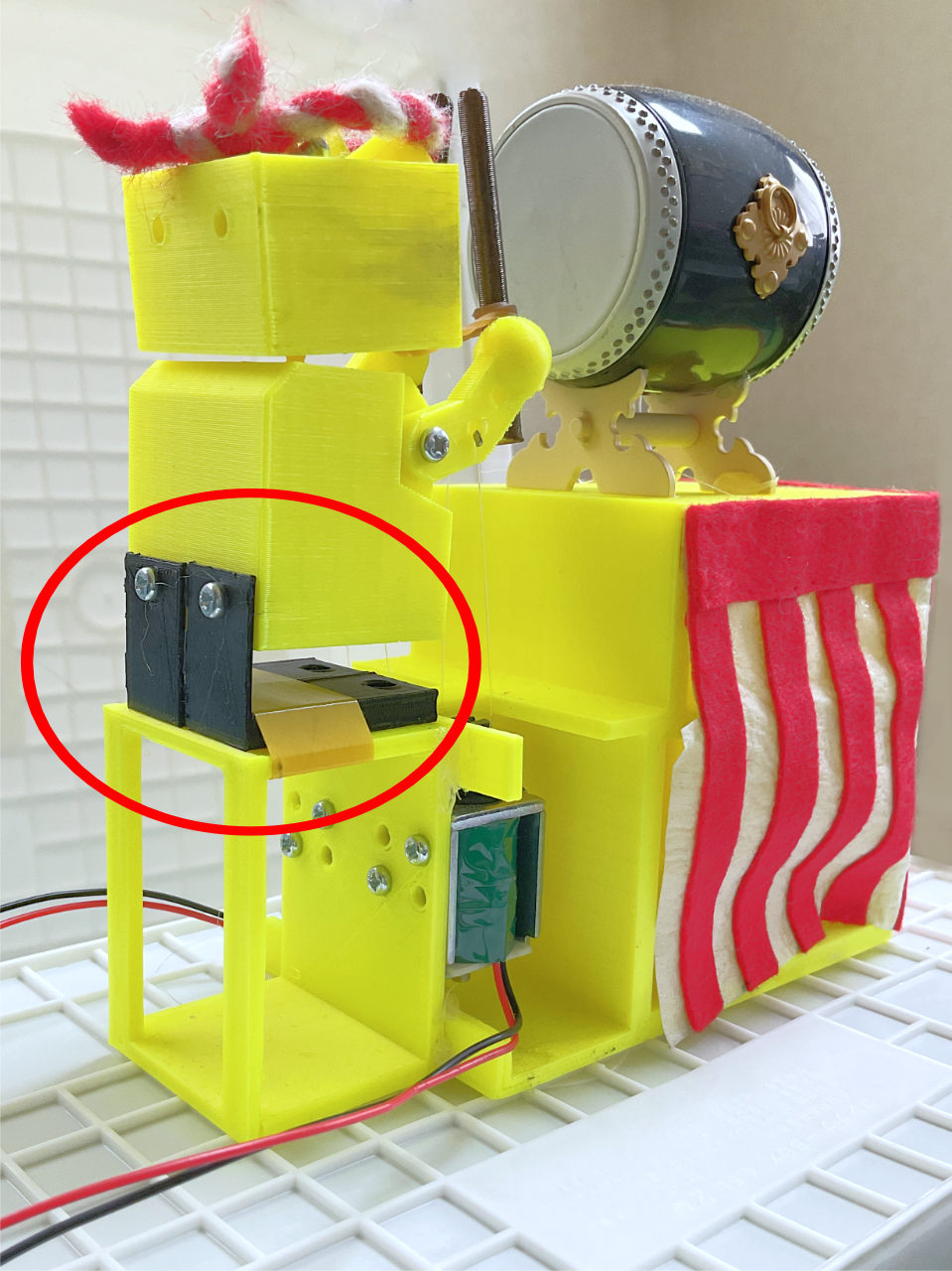
ご覧の通り、Catbot は3Dプリンタで作られた樹脂製です。
この樹脂にも様々な種類があります。
黄色い部分(バチと目も同じ樹脂。塗装しています)の樹脂は PLA。安価で扱いやすいので、3Dプリンタで使われる一般的な樹脂素材です。
さて、太鼓とバチの距離問題を見事解決に導いたのは PETG 。Catbot の黒い脚の部分です。
このPETG、良くしなる素材です。
(necobit のMIDI自動演奏グロッケンのバチにも使用)
保持する根元をPETGにすることで、
腕が下に引っ張られた瞬間に身体全体が前に動く。
そして、叩くとその反動に加え
頭から腕に繋がっている輪ゴム
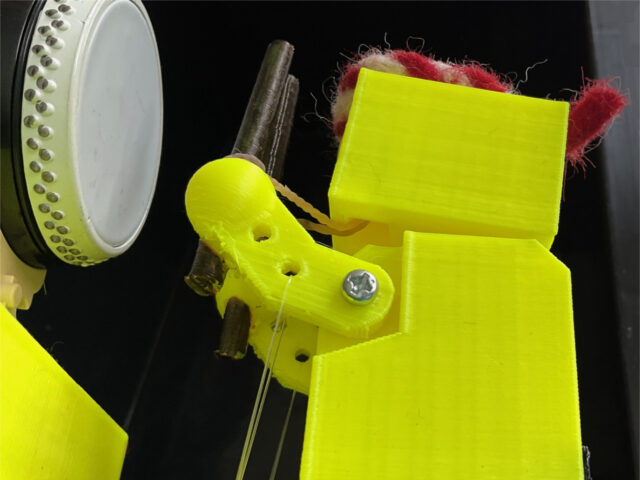
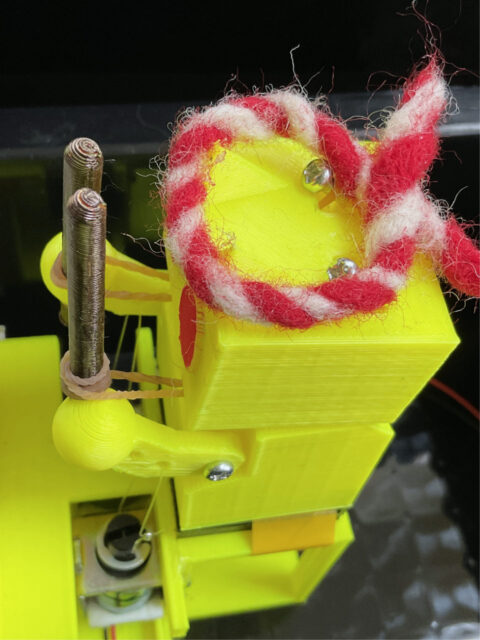
この輪ゴムの張力が、腕を後ろに引っ張って
打面からバチが離れる。

!腕の位置が戻る動きではなく、
バチが太鼓に当たった次の瞬間に、打面にくっ付きっぱなしになっていないことにご注目ください!
この動作、人間がやるとあまりに自然にやっているので
作るのも簡単にできると思われるかもしれません。
ところがどっこい
メカにやらせようとすると工夫が必要なところだと思います。
(そういう作り方をちゃんとやったことないので想像ですが)例えば…叩く瞬間に脱力させて反動で戻ったところで固定するとか…かな?脱力させないと戻らない、戻ってもそこで止められないとバインバイン何回も叩いちゃう…。
とにかくそんな工夫をあれやこれやすることなく、
PETGによる脚のしなりで反動をつけ
太鼓を最も良い響きで叩かせることに成功しました!
TPUで躍動感を出す
PETG樹脂のおかげで、脚がしなり
叩くアクションのたびに上体が前後に揺れるようになりました。
これだけでもいい感じの動きではありますが
さらに、
TPU という樹脂素材を使いました。これはゴムのように柔軟性があります。
Catbot の首部分に使用したことでとても可愛らしい躍動感が出ました。

Catbot の胴体と首を固定するジョイントパーツを
三角錐を頂点同士で繋ぎ合わせた、鼓のような形に
くびれ部分を細くして、TPUで3Dプリントしました。
この柔軟性のある樹脂を首部分だけに使用することにより
左右の腕がそれぞれ引っ張られた時に
ねじれが発生するようになります。
腕のアクションと同時に、ほんの少しだけ顔が左右に振れる。
ソレコン審査会(動画で観れます)でもしっかり注目いただきましたソレノイドでただ引っ張るだけはない躍動感のあるアクションは
このようにして誕生したのです…。
あとはMIDIでリズムを打ち込むだけ

赤いラインが右側の Catbot のリズム
黄色いラインが左側の Catbot のリズム
この真ん中の画面キャプチャは
DAW(MIDIシーケンサーソフト)で
実際の和太鼓演奏用MIDIデータを再生しているところです。
このMIDIデータは、いわゆるDTMで作れますので
パソコンやスマホなどのMIDI系音楽アプリを使えば
どなたでも、Catbot に好きなリズムを叩かせることができます♪
ところで、ここまで電子工作をしていないことにお気づきでしょうか
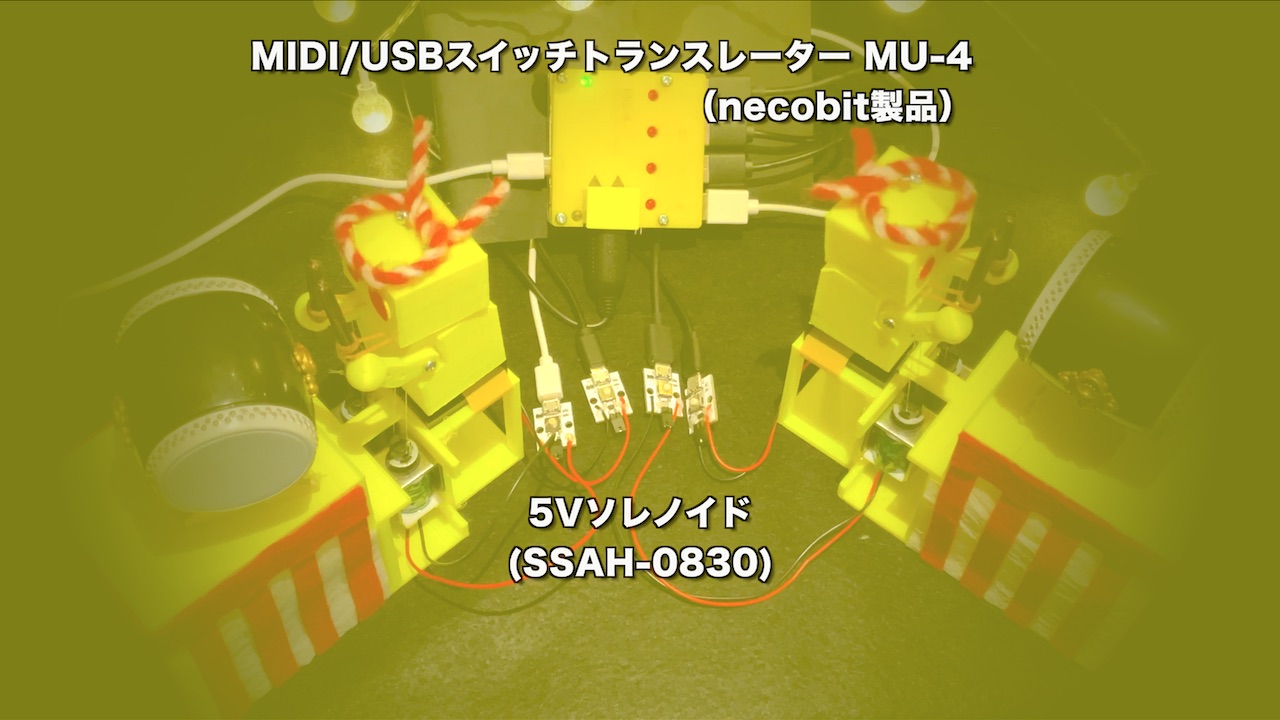
冒頭でも紹介しましたが
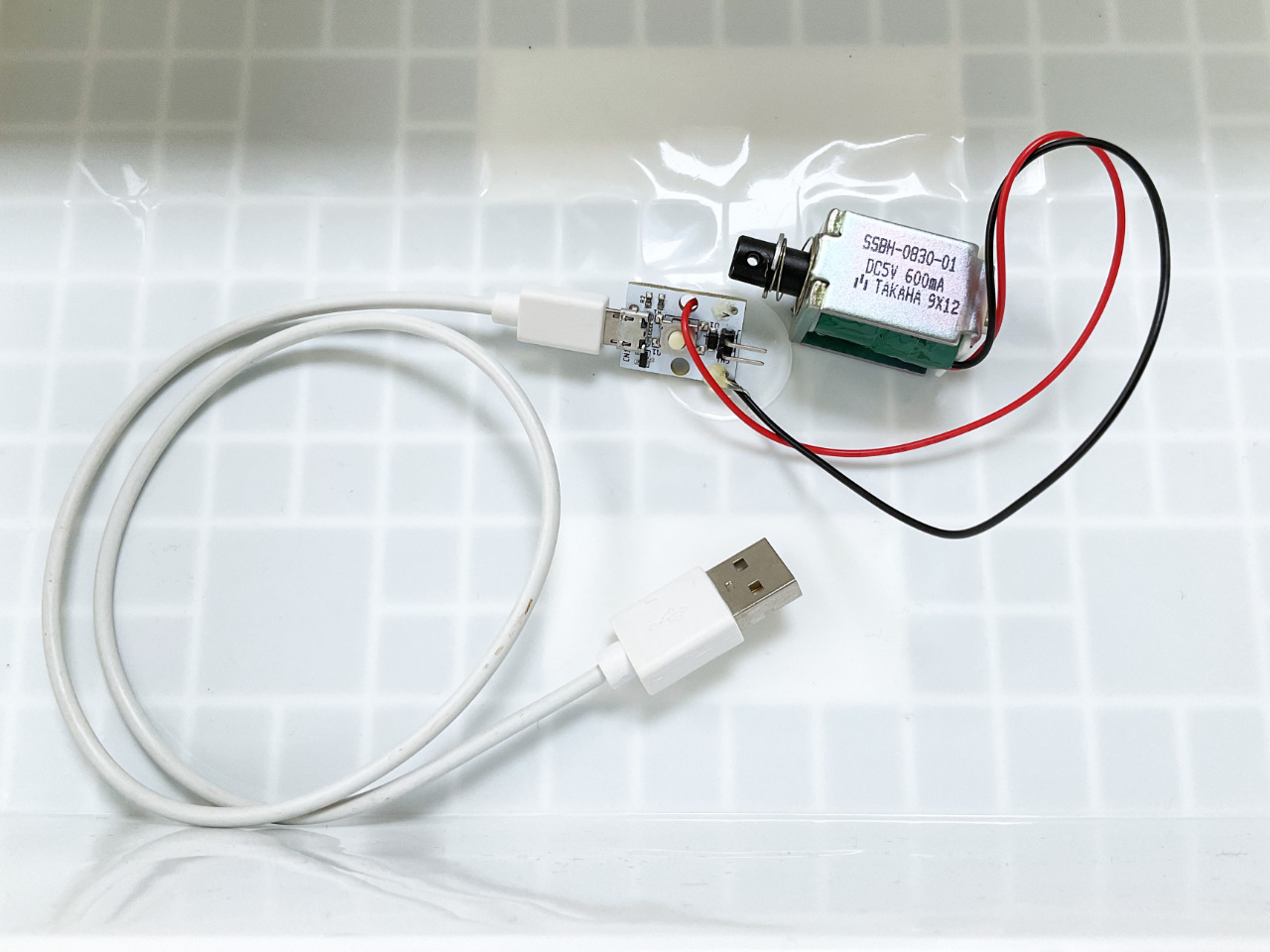
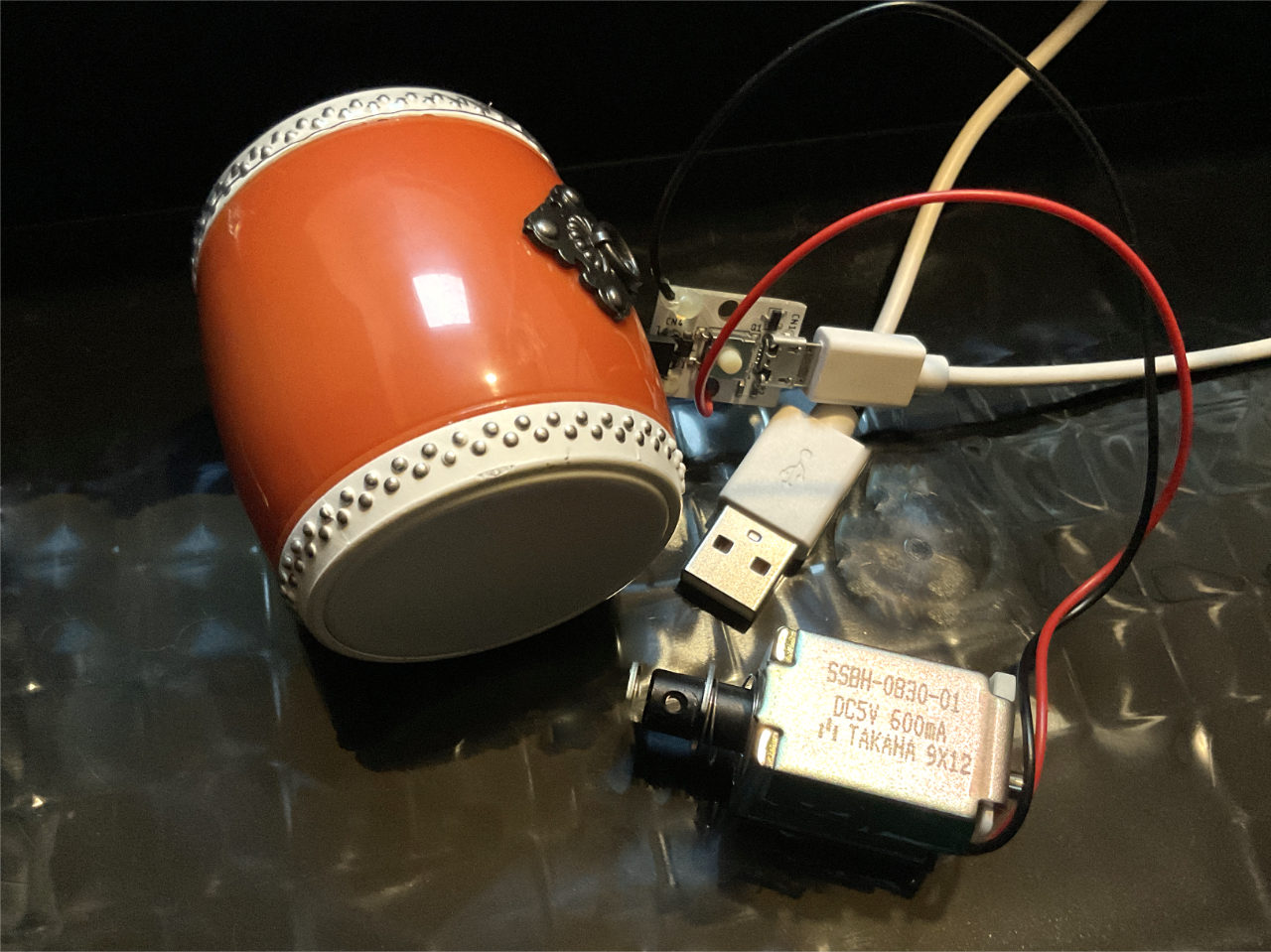
USB基板付き5Vソレノイドなら、そのままUSBケーブルをMU-4に繋げます。
リズムのMIDIデータを用意して…
そのほかの準備も説明したまとめもありますので
ぜひご覧ください → 詳しいスタートガイド MIDI/USBスイッチトランスレーター MU-4
結果、いいね!賞を受賞しました
というわけで、MIDI和太鼓演奏ロボット Catbot
応募締切前日(の夜中つまりほぼ当日)に完成しました。
ソレコンの応募は、2分以内の動画提出です。どんなによく出来てても動画で伝わらなければ審査員も評価できません。
内容で一番重視するのは、もちろん作りの説明です。
しかし動画というコンテンツ上
見た目でのわかりやすさ、作品のもつ雰囲気も大事なところです。
だいたい全体像が見えてきたあたりから、機構とは直接関係ない装飾の部分も作りました。和太鼓なのでお祭り・盆踊りの感じ。
電球風LEDライトは100円ショップ商品をそのまま使用。
背景でカラフルに点滅しているのは、撮影用背景パネルの裏からLEDライトを透かして幻想的な灯りを演出しています。
この雰囲気作りの点も、審査で好評をいただき嬉しい限りです。
めでたしめでたし…
コメントを残す